本片博客介绍了一个基于树莓派和YOLO框架的智能相机的制作过程。
原文见参考资料[1]

亚马逊刚刚发布了DeepLens,这是一款智能网络摄像头,它利用机器学习来检测物体、人脸以及一些活动。DeepLens还没有上市,但智能相机的想法令人兴奋。
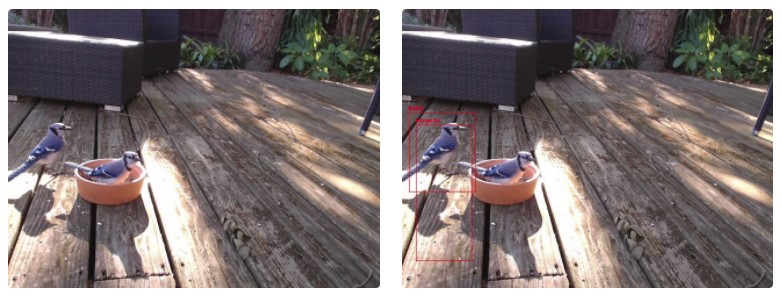
今天,我们将搭建一个深度学习摄像头,它可以探测到在网络摄像头图像中出现的鸟类,然后保存这只鸟的照片。最终的结果是这样的:
深度学习相机是一个全新的机器学习平台的开始。
DeepLens的计算能力有100GFlops的计算能力,这只是一个有趣的深度学习相机计算机所必需的计算能力的开始。在未来,这些设备将变得更加强大,并具有每秒推断数百张图像的能力。
但是谁愿意等待未来呢?
傻瓜相机和智能推理
我们会使用一个简易计算机(比如9美元的树莓派),把它连接到网络摄像头,然后通过WiFi发送图像,而不是在我们的相机中直接建立一个深度学习模型。在一定延迟的情况下,我们可以构建一个和Deeplens高年相似的原型,而且更加便宜。
所以在今天的博客,我们就这么做。们用Python编写一个web服务器,将图像从树莓派发送到另一台计算机进行推理或图像检测。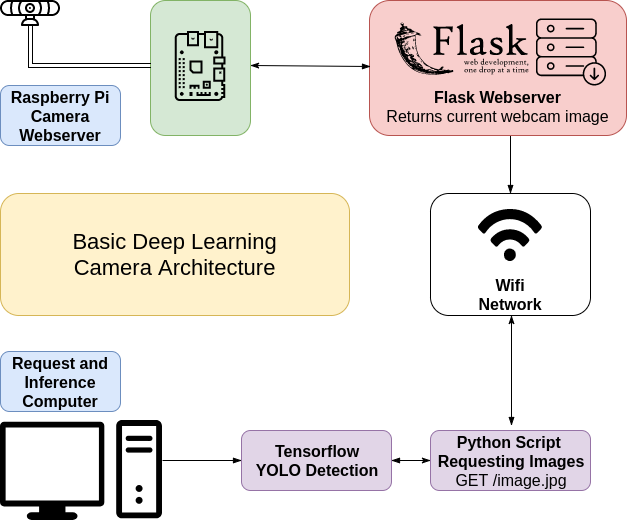
另一台拥有更多处理能力的计算机将使用一种名为YOLO的神经网络架构来对输入图像进行检测,并判断是否有一只鸟在摄像机的图片内。
我们将从YOLO框架开始,因为它是最快速的检测模型之一。模型的端口是基于Tensorflow,因此很容易安装和运行在许多不同的平台上。另外,如果你使用我们在这篇文章中使用的精简模型,你也可以在CPU上进行检测,无需昂贵的GPU。
回到我们的原型中。如果在相机的图像中发现了一只鸟,我们将保存这张照片以便以后进行分析。
这只是一个真正智能的深度学习相机的开始,非常基础。现在就开始着手做第一个版本的原型。
检测与成像
正如我们已经说过的,DeepLens的成像被植入了计算机。因此它可以进行基础水平检测,并通过自带的计算能力来确定这些图像是否符合你的标准。
但是,像树莓派这样的处理器,它的计算能力无法做到实时检测。因此,我们将使用另一台计算机来推断图像。
在这个例子中,使用了一个简单的Linux计算机,它带有一个摄像头和wifi接入(树莓派3和一个便宜的网络摄像头),并服务于用于图像推断的深度学习计算机。
这是一个很好的方案,因为它允许在野外使用许多便宜的相机,并且在同一个地方的台式机上进行计算。
摄像头图像处理方案
如果你不想使用树莓派的摄像头,同样可以在树莓派上安装OpenCV 3。作为旁注,我必须禁用CAROTENE的编译,以便在我的树莓派上获得3.3.1。你可能需要做同样的事情。完成之后,我们只需要安装Flask的web服务器,这样我们就可以从网络摄像头中加载图像了。
使用了Miguel Grinberg的优秀网络摄像头服务器代码作为基础,并创建了一个简单的jpg端点,而不是一个动态的jpeg端点:
如果你想要使用树莓派的视频摄像头,请确确保使用from camera_pi代码。并且注释掉from camera_opencv
你可以通过python3 app.py来运行程序,或者使用gunicorn,就像Miguel Grinberg的文章中提到的那样。它只是利用米格尔的出色的相机管理来关闭摄像头,当没有请求的时候,它还可以管理线程,如果我们有不止一台机器对来自网络摄像头的图像进行推断的话。
一旦我们在树莓派上启动它,我们就可以测试并确保服务器首先发现它的IP地址,然后尝试通过我们的web浏览器来实现它。
URL应该类似于http://192.168.1.4:5000 image.jpg: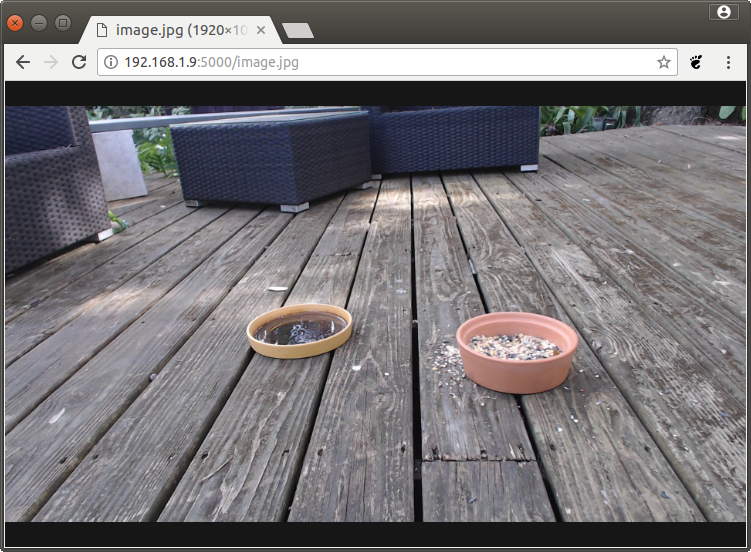
从相机服务器中提取图像并进行推断
现在我们已经有了一个端点来加载网络摄像头的当前图像,我们可以构建脚本来获取并运行这些图像的推断。
我们将使用requests模块,一个伟大的Python库,用于从url中抓取文件;以及Darkflow,在Tensorflow上实现的YOLO模型。
不幸的是,不能通过pip来安装Darkflow,所以我们需要复制代码到本地,然后在本地编译和安装,并进行图像的检测和推理。
在安装了Darkflow之后,我们还需要下载我们将要使用的YOLO版本的权重和模型。
在这个例子中,使用了YOLO v2微型网络,因为我想在一台较慢的计算机上运行我的检测和推理的程序,使用CPU,而不是GPU。这个微小的网络与完整的YOLO v2模型相比,它的精度要低一些。
此外,我们还需要在检测计算机上安装Pillow、numpy和OpenCV模块。
最后,可以编写代码来运行探测程序了:
到此,我们就有了一个非常基本的第一版图片检测的代码。我们可以在控制台看到树莓派的检测,我们也可以看到每一个被看到的鸟类被保存在我们的硬盘上。
之后,我们可以运行一个程序来对YOLO已经检测到的鸟类的图像进行标记。
调整参数
需要注意的一点是,我们创建的选项字典中的阈值键。这个阈值表示我们需要检测的物体的置信度。
出于测试的目的,我将它设置为0.1。但是这个门槛的低会给我们带来很多错误的信息。更糟糕的是,我们用于检测的精简YOLO模型比真正的YOLO模型的准确度要低一些,因此我们将会有一些错误的检测。
降低或提高阈值可以提高或降低模型的总输出,这取决于想要构建的内容。在这个例子中,倾向于更多的假阳性结果,更喜欢得到更多的鸟的图片而不是更少的。可以根据需要调整这些参数以满足特定的需要。
等待检测结果
让鸟飞到鸟食器里花了很长时间。我想我在后院放了几只鸟,在几小时内把食物放出来。相反,它花了几天时间。松鼠一直在吃我不吃的食物,在最初的几天里,我几乎没有看到天空中有一只鸟。最后,把二只鸟喂食器放在一个更加显眼的地方。通过这个,我终于得到了一些图片,就像在文章开头的那些图片一样。
下一步
这篇文章的代码同样可以在Github上获得。这篇文章是一系列课程的开始,我将使用深度学习相机尝试与鸟类互动。
参考资料:

